
Hobbie, moda ou mera consequência da evolução tecnológica, os drones estão aí! E pelo impacto que estão a ter na comunidade científica e tecnológica, vieram para ficar!
Desde cedo que a electrónica e a robótica me despertaram o interesse e sempre me acompanharam nas minhas ideias, devaneios e pequenos projectos domésticos (e assim continua)! O objectivo deste tópico é trazer-vos um pouco desse mundo, partilhando um pouco do que tenho feito nesta área, por onde pretendo seguir e aceitar novos desafios, porque novas ideias são sempre bem-vindas!
Conceito de “drone”
Importa primeiro definirmos do que falamos…afinal, o que é um “drone”?! “Drone” foi a palavra usada para nomear um veículo aéreo não tripulado desenvolvido pelas forças armadas dos Estados Unidos, sendo uma palavra oriunda do mundo das abelhas. Sem entrar nos detalhes históricos da palavra em si, “drone” atualmente define um veículo não tripulado ou remotamente tripulado, existindo três áreas distintas – veículos aéreos, terrestres e marítimos.
Nos veículos aéreos, além dos muito na moda “drones” de entretenimento, um outro exemplo muito popular deste tipo de veículos são os drones das forças armadas, os quais é comum ver a sua actuação no combate ao terrorismo. Estes veículos são tecnicamente conhecidos como UAV (Unmanned Aerial Vehicle) ou Veiculo Aéreo Não Tripulado.
Nos veículos terrestres, os exemplos mais comuns são os veículos usados para exploração espacial, como é o caso da sonda que se encontra actualmente a explorar Marte. São igualmente veículos não tripulados, podendo ou não ser autónomos.
Nos veículos marítimos, o exemplo mais comum são os ROV’s (Remotely Operated Underwater Vehicle), os veículos usados para exploração marítima controlados remotamente.
A primeira experiência
Dado o contexto do que pode ser um drone, no que diz respeito às minhas experiências e projectos pessoais, o foco tem sido nos veículos aéreos.
Em 2012 decidi construir o meu primeiro drone. A moda ainda não tinha pegado e não existiam sequer nas prateleiras do supermercado qualquer exemplar, contrariamente ao que hoje se vê. Sendo o meu objectivo, não só ter um drone mas também envolver-me na sua programação, construção e evolução das suas funcionalidades, lancei-me pela comunidade técnica da robótica e encontrei o que ainda hoje é uma das melhores bases para construir um veículo deste tipo a um custo acessível, o Ardupilot (na versão Ardupilot Mega 2).
Tendo o controlador ArduPilot, faltava tudo o resto para montar o meu drone… Como o orçamento já tinha sido aplicado no controlador, recorri a uma solução barata e comprei uma armação de um quadcopter (drone de quatro hélices), com motores e controladores de velocidade incluídos e adquiri uma bateria para alimentar todos os componentes.


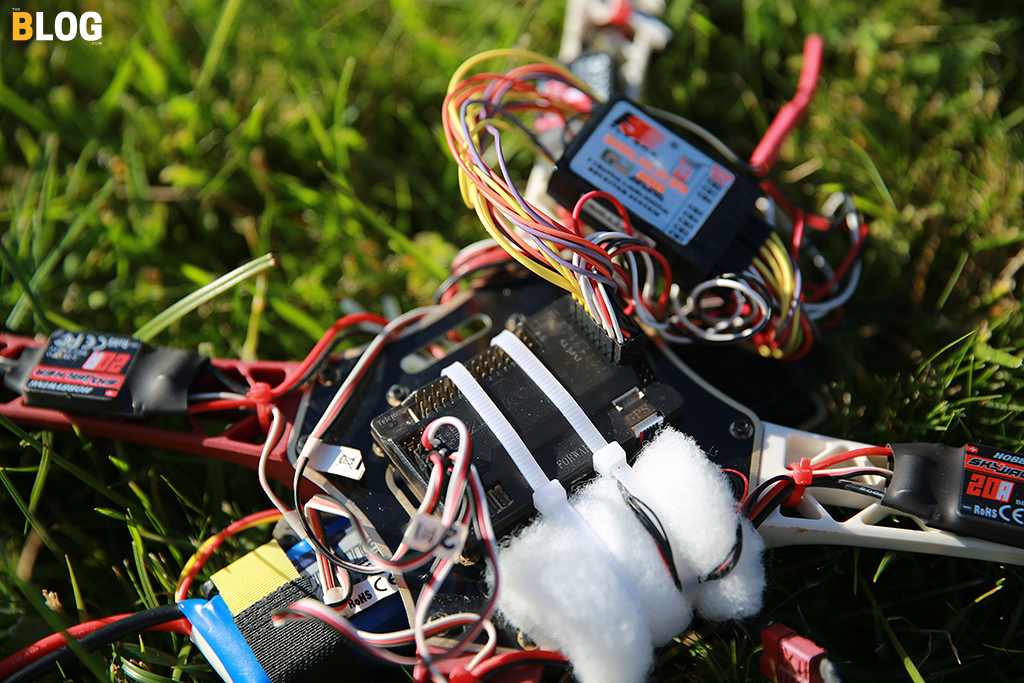
Reunidos os componentes necessários, montei a armação, motores, ESC, hélices, controlador, bateria e feitas as respectivas ligações. Na montagem há alguns pormenores a ter em atenção, nomeadamente o sentido de rotação dos motores e a respectiva localização dos motores na estrutura, pois existe uma ordem lógica. O mesmo cuidado se aplica às hélices, pois existem hélices apropriadas para a rotação no sentido dos ponteiros do relógio e outras para a rotação no sentido inverso.
Por último e não tão óbvio mas garantidamente um factor que influência a performance do drone, garantir que todos os componentes montados estão correctamente nivelados e a distribuição de peso é a mais uniforme possível! Uma incorrecta distribuição de peso irá inevitavelmente afectar a estabilidade do veículo durante o voo…o que, por experiência própria, complica (e muito!!) o processo de aprendizagem da condução destes aparelhos (voar remotamente qualquer veiculo desta natureza é já uma tarefa complexa…mais ainda se, quando é esperado que o veículo permaneça numa posição estável, este insista em mover-se obrigando a constantes compensações para não perdermos o controlo da situação).
Após a montagem e ainda do primeiro voo, falta um outro componente vital para o controlo do drone – o radio controlo por frequência. No meu caso reutilizei um comando que já tinha, que usava para o aeromodelismo e para primeira experiência servia para o efeito. Este radio tinha apenas 4 canais, o que para este projecto era o mínimo necessário, pois o controlo de um veículo deste tipo envolve quatro sinais distintos.

Com todo o hardware montado, firmware carregado, calibragem e configurações feitas, é altura do primeiro teste ao drone e à habilidade do operador!! Como seria de esperar os primeiros voos são tudo menos regulares e estáveis. O conhecimento do operador no que diz respeito a manipular este tipo de veículos é nulo, as condições meteorológicas (vento com alguma intensidade) não são as mais adequadas a um voo experimental e a própria estabilidade do drone, como referi anteriormente, não era a melhor…só depois deste teste dei realmente importância a este último ponto, que pode ditar o sucesso ou não de um voo regular e estável.
No entanto o resultado final é positivo, afinal tinha um veículo que voava e era controlado remotamente, todo ele construído e configurado por mim…sucesso!!

Na segunda parte deste post, descreverei algumas evoluções que fui fazendo e na terceira e última parte, o estado actual do drone e futuras ideias nesta área!!



[…] primeira parte deste post fiz uma breve descrição da minha experiência com a construção de um pequeno drone, dos […]
[…] de, na primeira parte deste post descrever a fase inicial da construção do meu drone e na segunda parte ter abordado alguns […]